Hajtás és végállások
A léptetőmotorokat a nem tökéletes egytengelyűség miatt kuplungon keresztül kell csatlakoztatni a tengelyek végéhez. A tengely hegye és a motor hegye között legalább 10mm legyen.
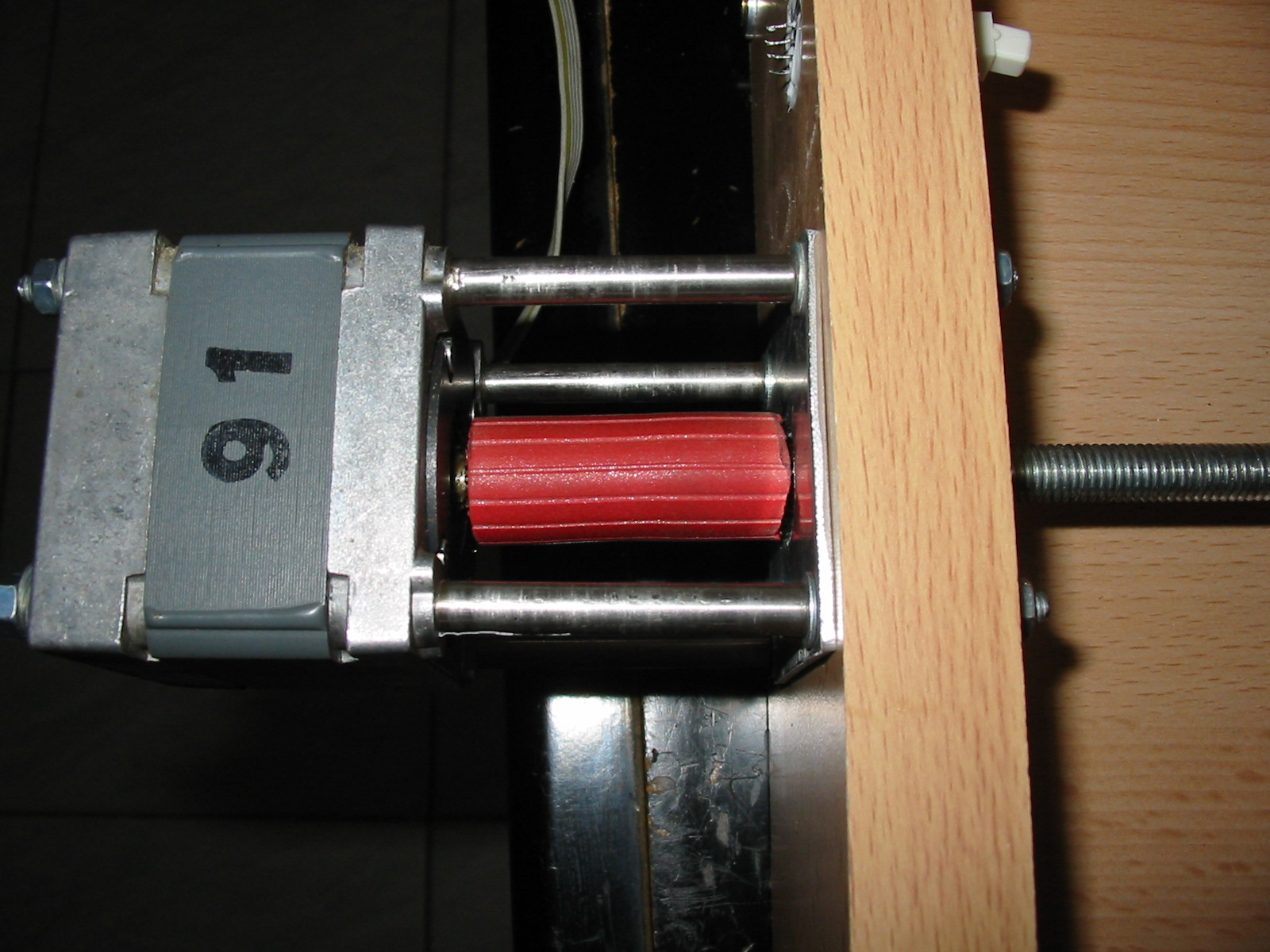
A motor adatai:
Tip.=Robotron 91 (NDK)
Rendszer=unipoláris 6 kivezetéses motor
U=24V
I=1.2A (szakaszos üzem)
R=18Ohm
L=ismeretlen
Lépésszám=100/fordulat (3.6°/Step)
Végállásnak én jó minőségű Hall elemes billentyűzet nyomógombokat használtam fel. Ezért még a Vcc (+5V) és a GND-t is oda kellett vinnem mindegyikhez.
A végálláskapcsolók beragasztása előtt a lyukon keresztül ujjunkat átdugva ellenőrizzük, hogy a vonszoló illetve a feszítőlap biztosan megnyomja e majd véghelyzetben? Ellenkező esetben gondoskodjunk megfelelő hosszabításról.
Mivel a feszítőlap nincs mereven rögzítve a tárgyasztalokhoz (kis hézag van köztük), irányváltáskor hozzáütődnek hol egyik, hol másik sarkuk. Ez kopogást okozott és zavar engem. Kitaláltam, hogy a rést sziloplast-tal kitöltöm ami ugyebár rugalmas. Később ez olyan problémát okozott a mozgásban, hogy enyhe lüktetés volt megfigyelhető a tárgyasztalok mozgásában. Ez abból eredt, hogy a menetesszárak nem voltak tökéletesen egyenesek és a vonszoló és a feszítő között időnként szorultak (mivel a feszítő rugalmasan ugyan, de mégis hozzá voltak rögzítve a tárgyasztalhoz is). Ezért utólag egy éles késsel a ragasztást középtengelye mentén végig el kellett vágnom. Így a lüktetés teljesen megszűnt viszont a ragasztó mint egy rugalmas ütköző funkcionál továbbra is nem engedve a deszka kopogását. Ez lett végül is a tökéletes megoldás! A filmen megfigyelhető amint a két ragasztóréteg mozog enyhén egymáson.
{kind=link}
{kind=link}